- 发布日期:2025-02-02 14:51 点击次数:114
在自然界中,生物的飞行方式一直是科学家们研究的重点。
从鸟类到昆虫,这些生物通过独特的空气动力学机制实现了高效的飞行。
近年来,随着微型飞行器(MAV)的发展,研究人员将目光投向了昆虫和鸟类的飞行模式,特别是蜂鸟这种能够悬停的小型鸟类。

蜂鸟的翅膀扑翼运动为设计仿生扑翼微型飞行器提供了宝贵的灵感。
仿生蜂鸟翅膀的设计与挑战
蜂鸟的翅膀结构和运动方式非常独特,尤其是在悬停时,它们能够在接近水平的平面上快速拍打翅膀,产生足够的升力和推力。
这种特殊的飞行方式使得蜂鸟成为研究扑翼空气动力学的理想对象。
然而,由于蜂鸟的体型较小,其翅膀的雷诺数较低,这给设计仿生扑翼飞行器带来了巨大挑战。
雷诺数是描述流体流动特性的关键参数,较低的雷诺数意味着流体粘性对飞行器性能的影响更大,因此如何在低雷诺数条件下提供足够的升力和推力成为了研究的重点。
为了应对这一挑战,研究人员开始探索不同展宽比(AR)对蜂鸟翅膀扑翼空气动力学性能的影响。
展宽比是指机翼的翼展与弦长之比,它直接影响机翼的气动特性。
通过对蜂鸟翅膀的生物学统计数据进行分析,研究人员发现蜂鸟的翼展在不同物种之间差异较大,但展宽比相对稳定,通常在3到4.5之间。
这一发现为设计仿生蜂鸟翅膀提供了重要的参考依据。
研究方法与模型设计
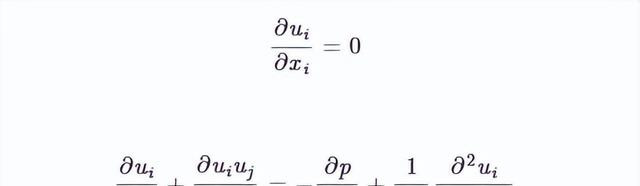
为了模拟蜂鸟的扑翼运动,研究人员创建了一系列不同展宽比的机翼模型,并基于计算流体力学(CFD)方法进行了数值模拟。
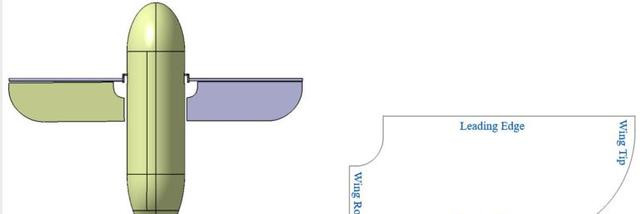
具体来说,研究人员首先根据蜂鸟翅膀的实际形状设计了机翼模型,确保机翼的后缘逐渐向前缘收缩,最终在翼尖处与前缘相遇。
此外,考虑到蜂鸟翅膀的柔软性和羽毛结构,研究人员在模型中去除了靠近翼根前缘的部分区域,以更真实地模拟蜂鸟翅膀的运动。
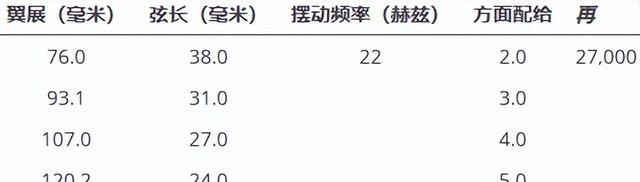
为了保持研究的合理性,研究人员选择了雷诺数27000作为实验条件,这是蜂鸟飞行时的典型雷诺数范围。
通过改变翼展长度和弦长,研究人员在保持相同雷诺数的前提下,得到了一系列不同展宽比的机翼模型。
接下来,研究人员定义了两个坐标系:全局固定坐标系OXYZ和机翼坐标系O′X′Y′Z′,用于描述机翼的运动姿态。
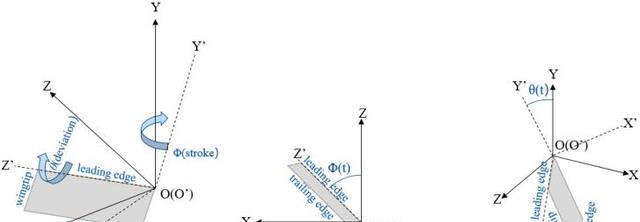
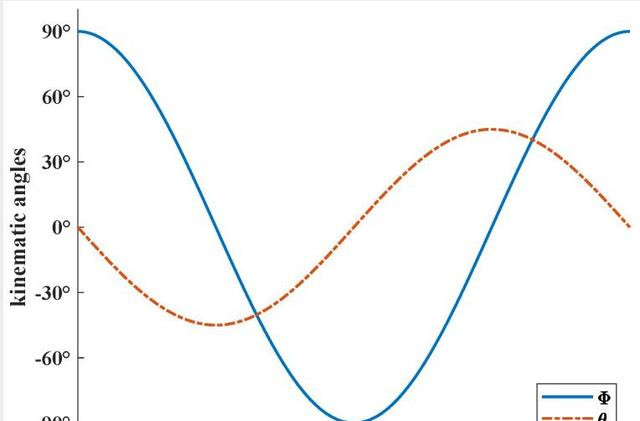
机翼的运动被简化为围绕扑翼轴的旋转和围绕前缘的倾斜运动,这两个运动共同决定了机翼的姿态变化。
数值模拟与结果分析
在数值模拟过程中,研究人员使用了ANSYS-FLUENT软件对仿生蜂鸟翅膀进行了仿真。
为了确保模拟的准确性,研究人员进行了网格独立性验证、时间步长独立性验证以及湍流模型验证。
结果显示,不同网格数和时间步长下的升力系数变化趋势一致,表明数值方法具有较高的可靠性。
此外,研究人员还对比了k-ω RNG湍流模型和大涡模拟(LES)的结果,发现两种方法计算的升力曲线非常相似,但k-ω RNG模型的计算速度更快,因此最终选择了该模型进行后续研究。
通过数值模拟,研究人员得到了不同展宽比下蜂鸟翅膀的升力和阻力特性。

结果显示,随着展宽比的增加,仿生蜂鸟翅膀的升力和阻力也随之增加。
这是因为较大的展宽比使得机翼上产生的涡流能够沿翼展更完整地发展,从而增加了机翼上下表面之间的压差。
然而,当展宽比超过一定值时,尾缘涡旋(TEV)的影响变得更加显著,导致前缘涡旋(LEV)过早脱落,进而降低了翼尖附近的升力。
这种效应使得升阻比和功率因数随着展宽比的进一步增加而降低。
仿生蜂鸟翅膀的最佳展宽比
综合考虑升力、阻力和效率等因素,研究人员发现,仿生蜂鸟翅膀在展宽比约为4时具有最佳的气动性能。
此时,机翼能够产生足够的升力,同时保持较低的阻力和较高的飞行效率。
这一结果与自然界中蜂鸟翅膀的实际展宽比相吻合,表明仿生设计在理论上是可行的。
实验验证与应用前景
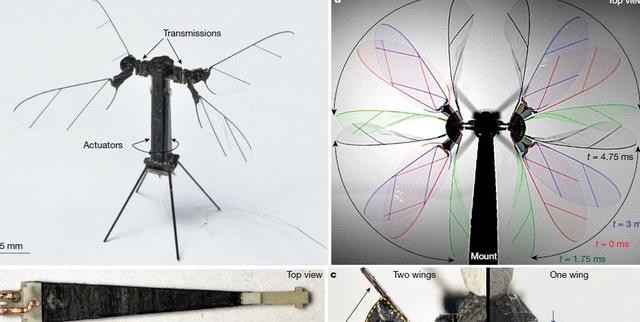
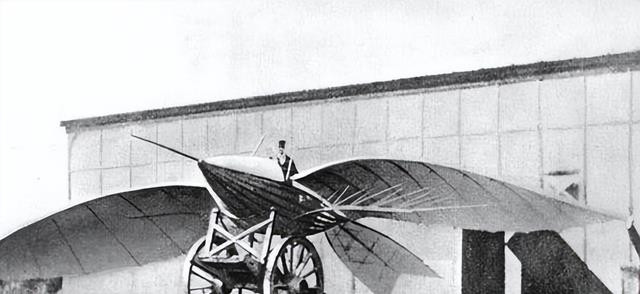
为了进一步验证数值模拟的准确性,研究人员将仿生蜂鸟翅膀模型与实际的FMAV进行了对比实验。
结果显示,在较低扑翼频率下,数值模拟与实验结果基本一致,证明了仿生设计的有效性。
然而,当扑翼频率超过14 Hz时,实验数据出现了较大的误差,这可能是由于传感器在高频率下的响应问题所致。
尽管如此,研究结果仍然为未来仿生扑翼飞行器的设计提供了重要的参考。
总的来说,这项研究表明,展宽比对仿生蜂鸟翅膀的空气动力学性能有着显著影响。
通过合理选择展宽比,可以优化仿生扑翼飞行器的升力、阻力和效率,从而提高其飞行性能。
未来的研究可以进一步探索其他因素对仿生扑翼飞行器性能的影响,例如机翼材料、扑翼频率等,以推动仿生扑翼飞行器技术的发展。
结语
仿生扑翼飞行器的研发不仅有助于解决微型飞行器在低雷诺数条件下的升力和推力问题,还为未来的无人机设计提供了新的思路。

通过对蜂鸟翅膀的深入研究,科学家们能够更好地理解自然界中的飞行机制,并将其应用于工程实践中。
未来,随着技术的不断进步,仿生扑翼飞行器有望在军事侦察、环境监测等领域发挥重要作用,为人类带来更多的便利和创新。